Dispatcher
by Charles R. Hentz
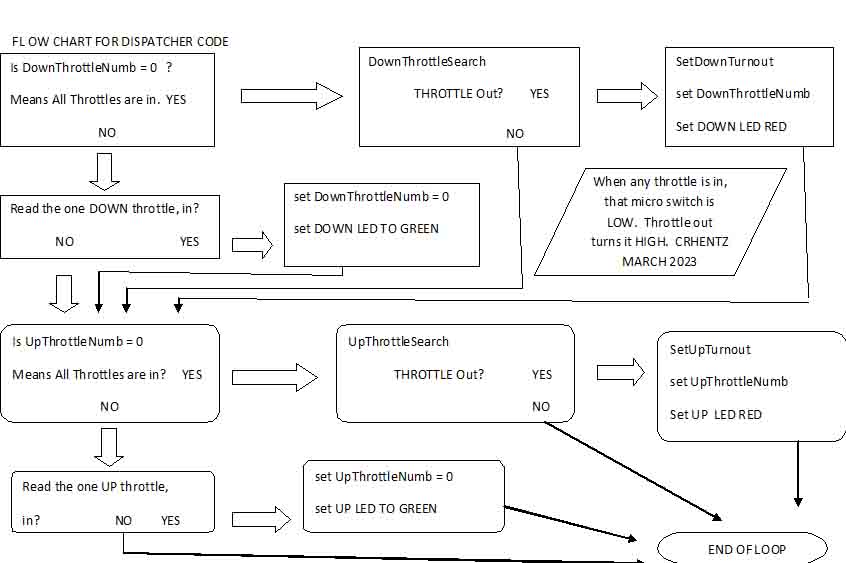
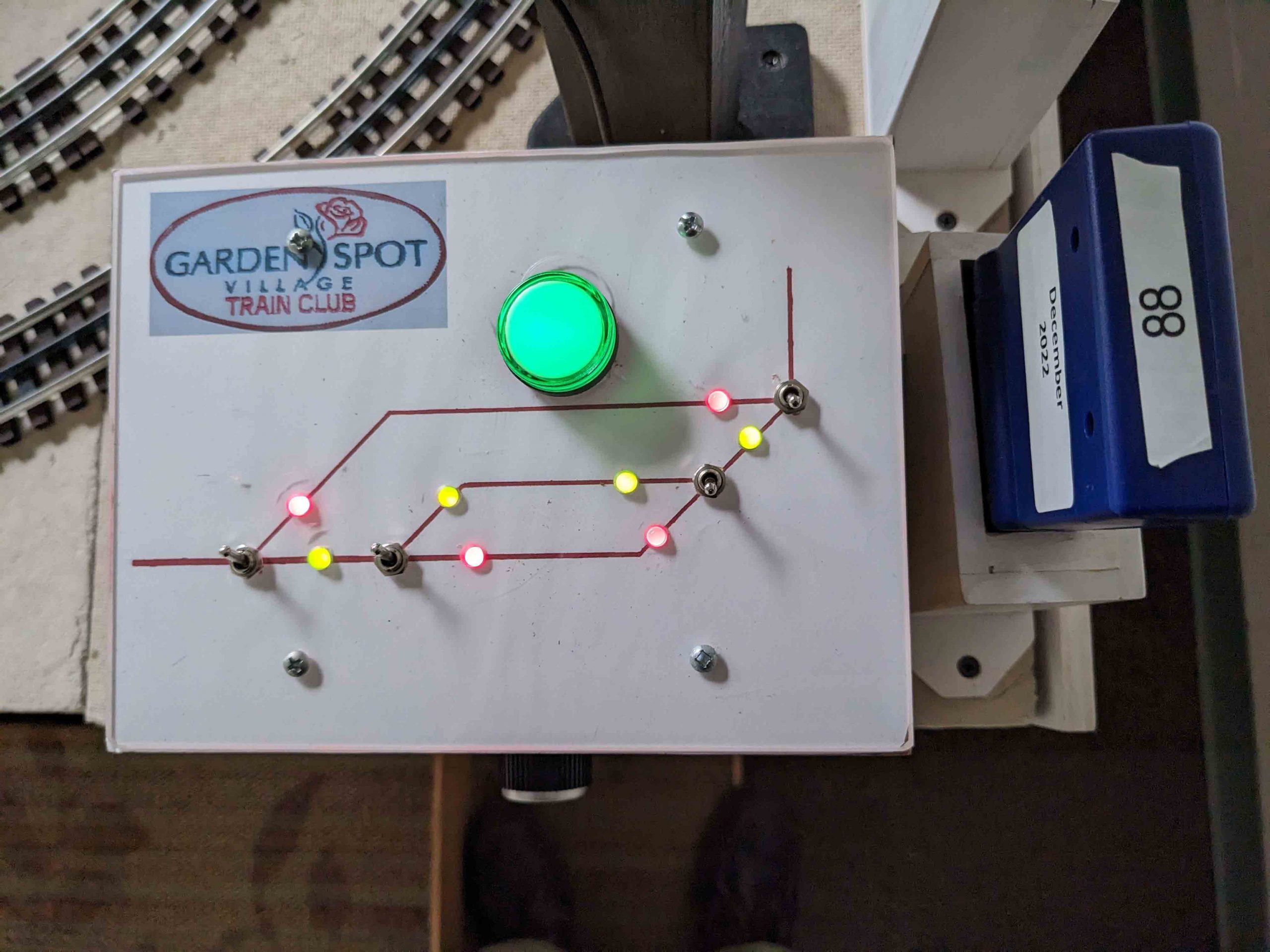
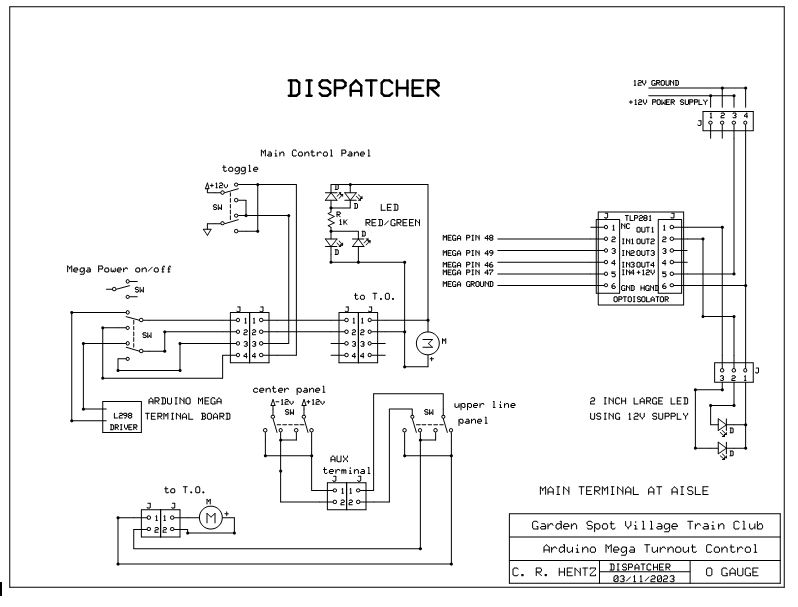
In August of 2022 Harry Black got an inspiration in the shower. Why not have an automatic dispatcher set all the turnouts on the O gauge layout? This would allow more action as it took a minute to set the toggle switches for the correct path for each train. Now when a throttle is removed from its holder near its parked train, a micro switch is opened. This will be read by the Arduino Mega microprocessor. That throttle’s path is then set by the L298 Drivers using a multidimensional array in the code. Only one throttle (one train) will run at a time on each line. After one trip around the layout, each train will be returned to its assigned siding and the throttle replaced into its holder closing its micro switch. This will change the status LED to green to indicate the all throttles have been returned to their holders. The system will be in service full time. If for any reason manual operation is needed, all eight toggle switches on the hidden control panel can easily be thrown to manual control. This should allow train operation as fast as you can pick up a throttle and turn the speed dial.

throttle holders
micro switches at side large green status LED in background
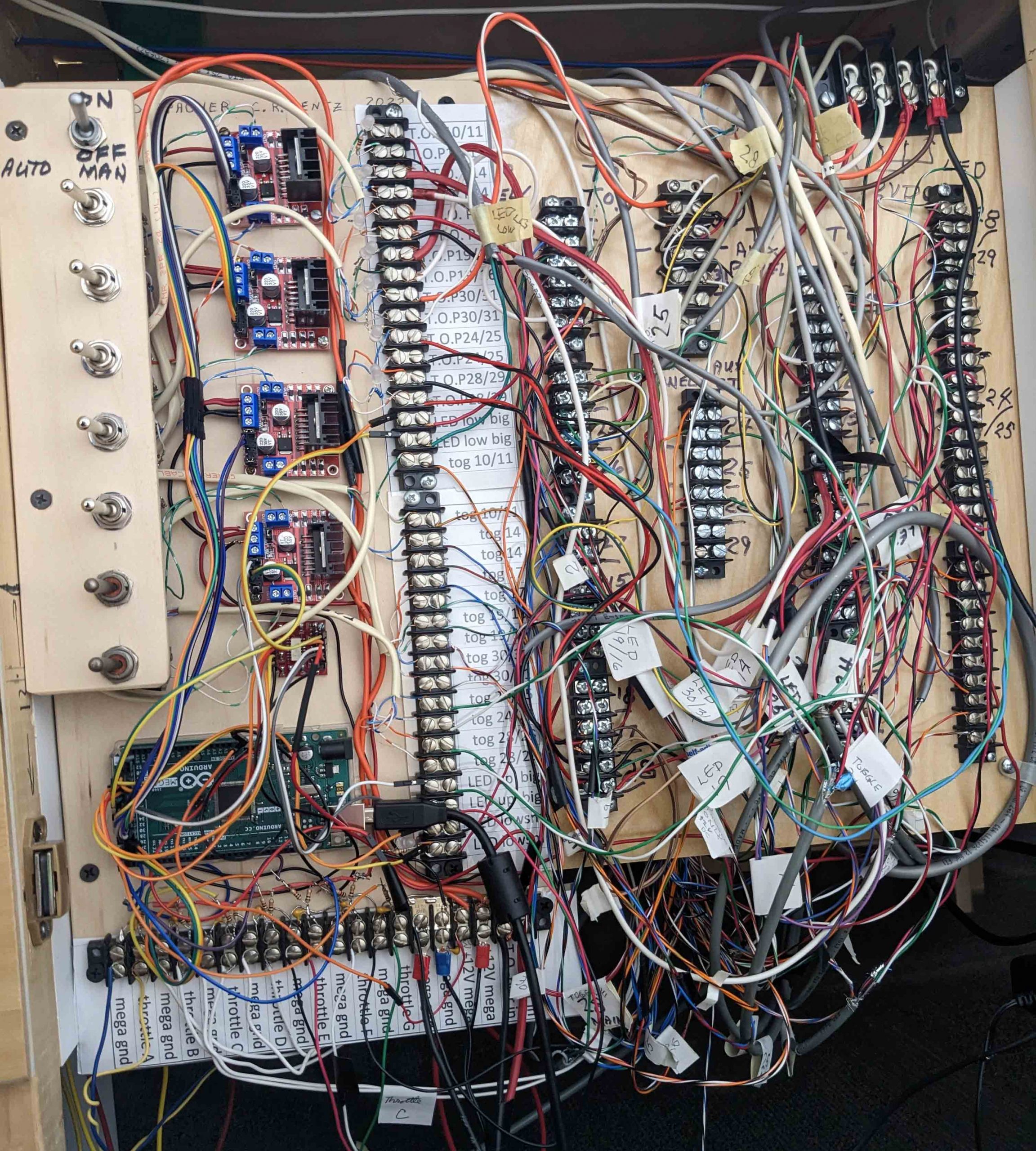
Up Control Panel
Dispatcher Layout
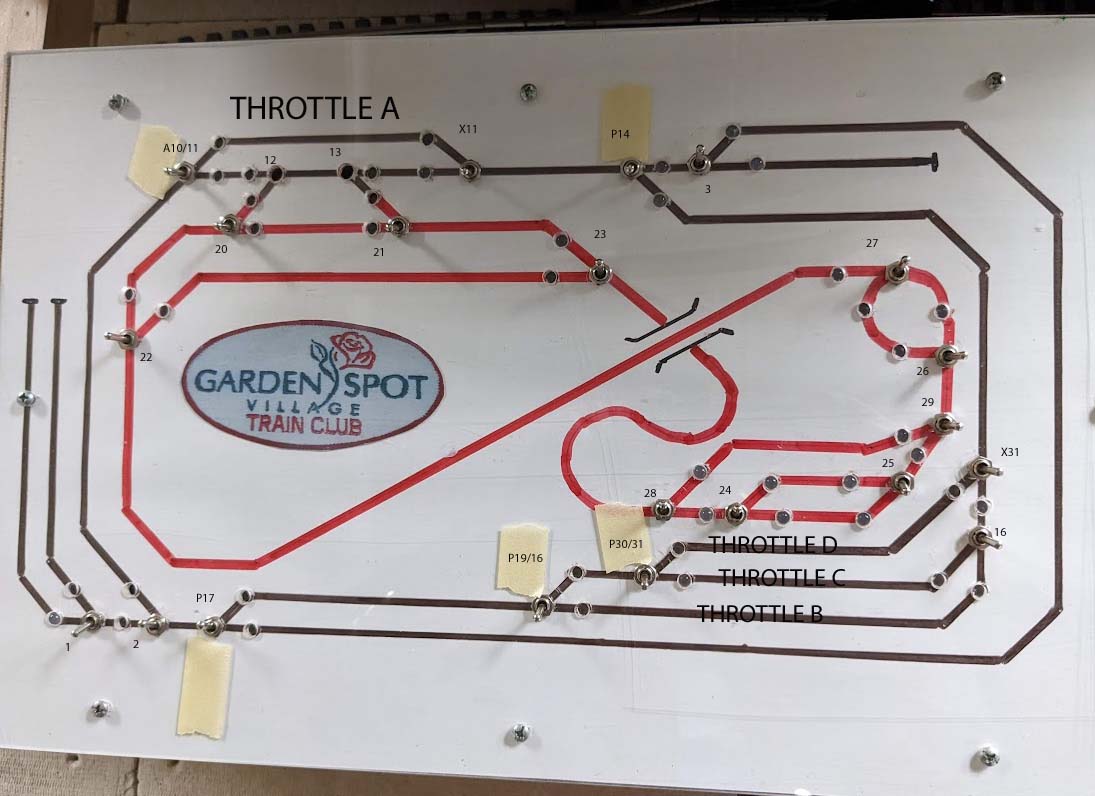
Control Panel Plan

TURNOUT POSITION
schematic23